Quelle: Learning Dexterous In-Hand Manipulation https://arxiv.org/abs/1808.00177
Während die geschickte Handhabung von Objekten eine grundlegende alltägliche Aufgabe des Menschen ist, ist sie immer noch eine Herausforderung für autonome Roboter.
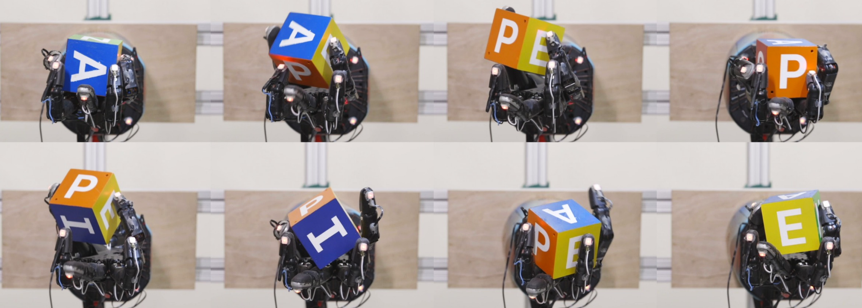
Da die menschliche Hand in der Lage ist, eine Vielzahl von Aufgaben in den verschiedensten Umgebungen mit grosser Geschicklichkeit auszuführen, ist das Herstellen einer künstlichenHand eines der inspierensten Ziele in der Robotik.
Forscher von OpenAI haben jetzt mit Hilfe von KI einen grossen Schritt in diese Richtung gemacht (siehe https://arxiv.org/abs/1808.00177) und die Ergebnisse sind beeindruckend
<iframe width=“560″ height=“315″ src=“https://www.youtube.com/embed/jwSbzNHGflM“ frameborder=“0″ allow=“autoplay; encrypted-media“ allowfullscreen></iframe>
Im Folgenden die vier wichtigsten Schritte:
- mit einer grossen Anzahl von verteilten Simulationen werden Daten in Umgebungen mit zufälligen Variationen gesammelt;
- der nächste Steuerschritt wird basierend auf der Position des Objekts und basierend auf der Position der Fingerspitzen mit Hilfe eines LSTMs ausgewählt.
- aus drei simulierten Kamerabilder sagt ein neuronales Netzwerk die Position des Objekts vorher
- Punkte B) und C) werden für den Transfer in die reale Welt kombiniert
Einige überraschende Fakten zum Schluss:
- Die finale Version der Modelle wurde ohne reale Daten trainiert
- Taktile Wahrnehmung war nicht nötig
Wenn Sie Fragen zum Bereich Videoverarbeitung mithilfe von KI haben oder erfahren möchten, wie Sie Ihre Maschinen basierend auf Kamerainput automatisch ansteuern z.B. im Bereich der Qualitätssicherung, kontaktieren Sie uns gern unter: .
Zurück