Source: Learning Dexterous In-Hand Manipulation https://arxiv.org/abs/1808.00177
While dexterous handling of objects is a daily routine for humans, this task remains a challenge for autonomous robots.
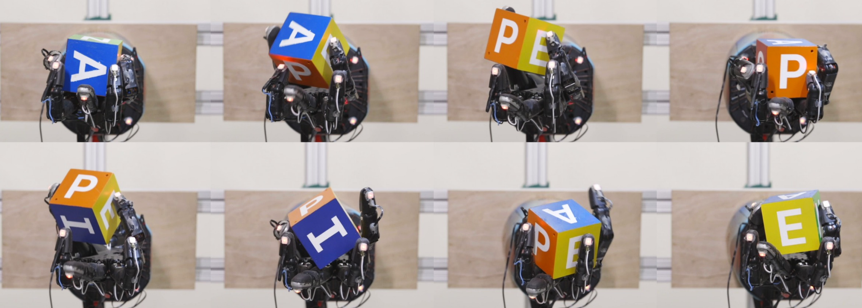
Since the human hands can perform a vast number of tasks in many different environments with great ability, creating an artificial hand is one of the most inspiring goals in Robotics.
Researchers at OpenAI now have accomplished a big step in this direction with the help of AI (see https://arxiv.org/abs/1808.00177). The results are impressive.
<iframe width=”560″ height=”315″ src=”https://www.youtube.com/embed/jwSbzNHGflM” frameborder=”0″ allow=”autoplay; encrypted-media” allowfullscreen></iframe>
Following are four of the most important steps:
- data are gathered in randomized environments by using a large number of distributed simulations
- the next step in the control policy is chosen using an LSTM based on the position of the object and the position of the fingertips
- from three camera images, the neural network predicts the position of the object
- the results from points B) and C) are used to transfer to the real world
Surprising facts before we close:
- The final version of the model was not trained on real data
- Tactile sensation was not necessary
If you have any questions about image processing using AI, or if you would like to know how to generate more value with your images or videos, feel free to contact us at
Zurück